光学式AGV「リコー 無人搬送車 M2」
商品カタログ
カタログダウンロードはこちら

AGV
リコー 無人搬送車 M2
カスタマイズキット
何をお探しですか?
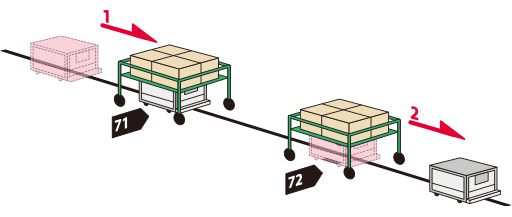
手動で行っていた牽引物の脱着を
自動で行うことができます
台車の中へAGVが潜り込むことに
より、狭い通路でも走行できます
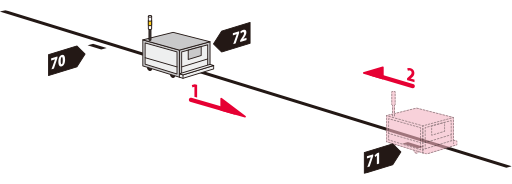
直進ルートの場合において、
後進走行が可能となります
人手で行っていた”充電”の
自動化で活人化および安全性の
向上を実現します
PLC活用によりAGVとの連携を
図ります
空き端子台に外部デバイスを
接続し、指定時間AGV内のリレーを
ONにする機能になります

- 手動で行っていた牽引物の脱着を自動で行うことができます

※横にスクロールできます。
| 牽引能力 | 最大牽引量 | 300kg(参考値:連結状態や路面状態等による) | |
|---|---|---|---|
| 牽引条件 | 連結部タイプA(イレクターパイプ台車など) | 連結部タイプB(かご台車など ) | |
| 牽引部高さ | 床面から150mm~290mm | 床面から160mm~300mm | |
| 牽引把持部 (奥行方向) |
10~58mm | 42~54mm | |
| 牽引把持部 (幅方向) |
70mm | 47mm | |
| 牽引対象物 | 直径26~32mmの牽引部をもつ台車等 | 奥行50mm程度のL字鋼を用いたかご車等 | |
| 最小旋回半径 | R1,500mm | ||
| 牽引物最低重量 | 15kg以上 | ||
| 牽引物車輪構成 | 後輪2輪固定タイプ ※牽引物の接続部:検証/事前打ち合わせ:要 |
||
| 脱着時経路制約 | ・脱着時にAGVの姿勢が直線に対して傾きがないこと ・脱着位置より1m以上の直進経路を設けること |
||
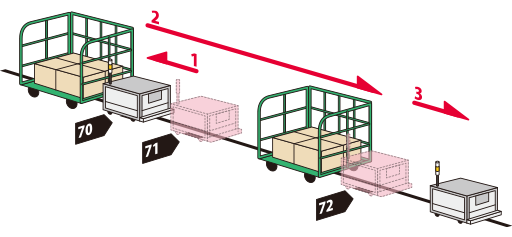
- 台車の中へAGVが潜り込むことにより、狭い通路でも走行できます
※横にスクロールできます。
| 牽引能力 | 最大牽引量 | 60Kg(参考値:連結状態や路面状態等による) ※重り(有償)の搭載により、約120kgまでの走行検証済み |
|---|---|---|
| 牽引条件 | 連結部高さ | 床面から495mm |
| 連結部位置(奥行方向) | 2本共に前方から550mm(前方バンパーは含めない) | |
| 連結部位置(幅方向) | それぞれ外側から60mm | |
| 最小旋回半径 | R600mm | |
| 牽引物キャスタ | 4輪フリータイプ | |
| 連結時経路制約 | ・連結時にAGVの姿勢が直線に対して傾きがないこと ・連結位置より1mの直進経路を設けること |
|
| 棚車設置位置(進行方向) | 所定位置より±50mm以内(ただし、棚車形状による) | |
| 棚車設置位置(幅方向) | 所定位置より±50mm以内(ただし、棚車形状による) | |
| 安全対策 | ピンの動きが妨げられ、過電流を検知した場合、停止する | |
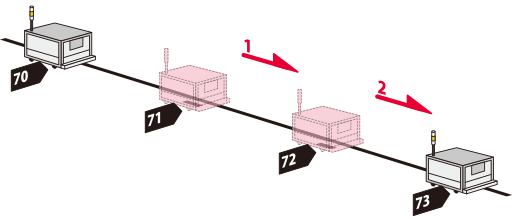
- 直進ルートの場合において、後進走行が可能となります
※横にスクロールできます。
| 後進条件 | 走行ルート | 直線ルートのみ(直線に対してAGVの姿勢に傾きがない状態で後進を開始すること) |
|---|---|---|
| 後進速度 | 22.5m/分以下(初期値15m/分) | |
| 後進走行精度(AGV単体) | 左右方向:80mm幅 | |
| 後進停止精度(AGV単体) | 前後方向:±15mm | |
| 後進用番地テープ | 後進方向右手側に設置(相対番地のみ対応) | |
| コースアウト | 自律探索動作を実施せず、即停止 | |
| ※積載、牽引時の後進走行精度は未評価となります(保証外) | ||
| 安全対策 | ・後方バンパー:後方バンパー接触時、その場に停止 ・後方障害物サブセンサー:障害物検知時、障害物検知状態で停止 |
|
- 人手で行っていた”充電”の自動化で活人化および安全性の向上を実現します

- PLC活用によりAGVとの連携を図ります

- 空き端子台に外部デバイスを接続し、指定時間AGV内のリレーをONにする機能になります